Zu meinen Philips (Dr. Beyschlag GmbH.)-Seiten
To my pages about Philips (Dr. Beyschlag GmbH.)
At the beginning of the 1970s, Intel's first official microprocessor 4004 also came to the attention of German industrial engineers, but not for a long time did every teacher at technical schools and universities know of its existence, probably no one, but if on private initiative they did, then not of the functionality of such a microcomponent. Neither manual literature nor detailed loose-leaf documents existed outside of the purely object-related information that could be taken from the data sheet. We had to work on our own with scarce manufacturer's documentation, and to try to make sense with a toggle switch experimental setup oriented by the basic principle of the sketch to get some cleverness. The advantage of being able to use a hardware to solve different problems because of different software programs was clear to us from the beginning. Soon the Intel 8008 was available, soon the 8080 and others, but the company National Semiconductors came out with the first 16-bit processor IMP-16, shortly after with their PACE, which I got involved with for more comprehensive application considerations. The mnemonically well structured assembler language of the PACE promised a comprehensible programmability, and so we stayed with this module, around which the universally usable system "Beyschlag-USS" soon was developed and built in many copies.
Man kämpfte um jedes Byte Speicherbelegung. Die
Assembler-Software wurde so kurz und effektiv wie möglich geschrieben. Minimierte, störsignalsichere
Standard-Subroutinen wurden für den generellen Einsatz archiviert. Beispiel: Dreifach-Statusabfrage externer Eingänge.
Zweimal derselbe Status = gültiger Status. Ein Kaufgerät brannte die in den Maschinencode umgesetzte Software in
programmierbare Speicher (PROMs), die auf einer USS-Einsteckkarte eingelötet waren. Das alle Steckkarten verbindende
Bus-System konnte, wie die Betriebssoftware auch, nur in Eigenentwicklung entstanden sein. Es gab nichts
Käufliches.
One fought for every byte of memory allocation. The assembler software was written as short and effective as possible. Minimized, interference-safe standard subroutines were archived for general use. Example: Triple status query of external inputs. Twice the same status = valid status. A purchase device burned the software converted to machine code into programmable memories (PROMs), which were soldered onto a USS plug-in card. The bus system connecting all plug-in cards, like the operating software, could only have been developed in-house. There was nothing available for sale.
Hauke Hansen and I made the first attempts to understand how software works, and this in a necessary seriousness, but also arised some amusement. In Westerland and Heide, we worked together as electronics developers – an indispensable colleague to the company and one to whom it owes a great deal because of his clear and lucid thinking. Soon familiar with the advantages of programmable hardware technology, another amusement arose. During the tour of a high-ranking from a Philips research lab, to whom we tried to demonstrate this advantage in an experimental set-up, he looked at the pulled out microprocessor chip between his thumb and forefinger, put that thing down with his lips pulled down, and – turning to face the laboratory exit – instructed us with the words: "Gimmick. Forgotten in two years."
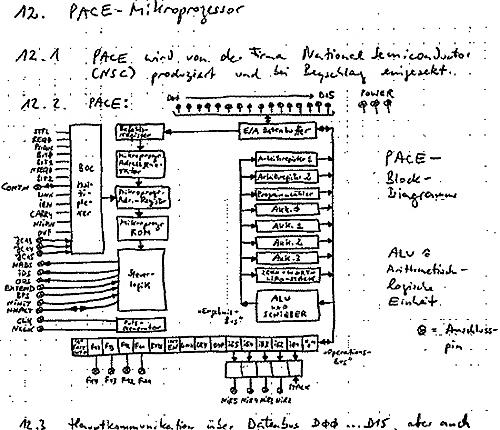
Das vollständig richtige Verstehen der nicht
gerade unkomplizierten Inneneinrichtung des PACE-Mikroprozessors kostete mich nicht nur in der Firma, sondern auch zurückgezogen an
manchen Abenden zu Hause Hingabestunden, doch der feste Entschluss, den Entwicklungsaufwand für den USS-Prototyp anzugehen, lohnte sich
in jeder Hinsicht. Mit einem unverständigen, auch noch misstrauischen Geschäftsführer hätte das Unternehmen viel Zeit
verschlafen und manchen fortschrittlichen Zug abfahren lassen, um bei der gewohnten, durch Spezialentwicklung, Bau und Wartung insgesamt
teuer und teurer werdenden reinen Hardware zu bleiben. Helmut Düll wollte sich mit Software nicht mehr abgeben, aber er war für
aussichtsreiche Neuerungen, die dem Unternehmen Vorteile versprachen, immer zu haben. Da musste er nicht lange überzeugt
werden.
The completely correct understanding of the not exactly uncomplicated interior design of the PACE microprocessor cost me hours of dedication, not only at work, but also some evenings at home in seclusion, but the firm decision to tackle the development effort for the USS prototype was worth it in every respect. With an incomprehensible, even distrustful managing director, the company would have many time missed and let many a progressive train leave the station in order to stay with the usual hardware, which would become more and more expensive as costly hardware due to special development, construction and maintenance. Helmut Düll no longer wanted to bother with software, but he was in favor of promising innovations that promised advantages for the company. Since he did not have to be convinced for long.
The still existing, amateurishly ignorant attitude of many corporate and managers and their educationally deprived executives in matters of electronics technology, that electronics stuff in sheet metal or other mechanical boxes belonged to mechanics, soon diminished as a result of the experience of purely practical application benefits, even if much too hesitantly. Mechanics and electronics stand side by side as equals and complement each other, but reaction and process speeds can (and could) never keep up with purely mechanicalness. The application flexibility of software-controlled electronics, the digitized data processing, communication and information capabilities, the centralization via data bus systems, and much more, was and is not to be achieved in a purely mechanical way. The hierarchical subordination of electronics to mechanics has always been a known nuisance, recognized early on in broadcasting technology.
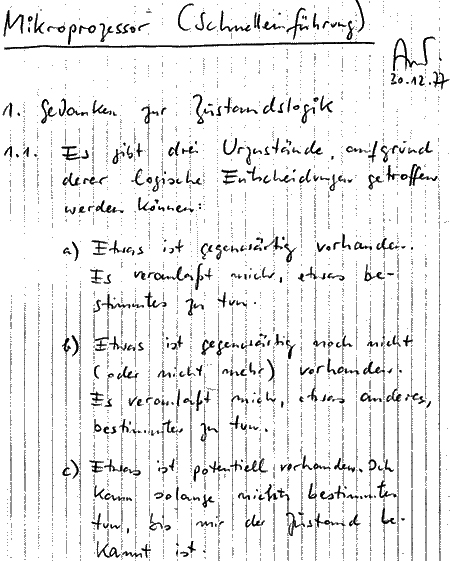
Menschlich-vernünftiges Tun dient stets Zwecken (auch inneren). Diese teleologische Grundlage bedeutet Philosophie. Auch in der einfachsten Form enthält ein philosophischer Ansatz oft die beste Methode, um in ein sich erweiterndes Spezialgebiet umfassend einzusteigen. Die schlechteste Methode ist jene, die das ablehnt. Wer „blind“ oder halbwissend mit dem Einfachsten, nur halbwegs Verstandenen zu arbeiten beginnt, ob physisch oder geistig, wird oft den eingeschlagenen irrtümlichen Weg zurückkehren müssen. Hier nun wird einleitend eine besonders einfache, zulässigerweise noch unvollständige Grundlage erörtert, eine unübliche Denkweise in der Elektronik-Entwicklung.
Human-reasonable actions always serve purposes (also inner ones). This teleological basis means philosophy. Even in the simplest form a philosophical approach often contains the best method to get into an expanding special field comprehensively. The worst method is that which rejects it. Those who start to work "blindly" or half-knowing with the simplest, only half-understood thing, whether physical or mental, will often have the erroneous path taken and have to return. Here now, by way of introduction a particularly simple, permissibly still incomplete basis is discussed, an unusual way of thinking in electronics development.
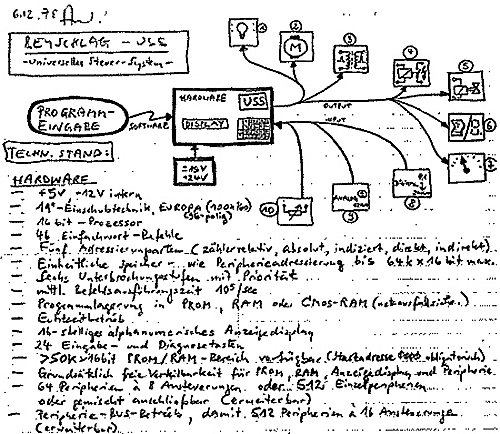
Das USS als universelles Steuersystem, 1978, basierte auf
dem PACE-Mikroprozessor von National Semiconductors Inc. und hausgemachtem Datenbus.
Das Nachfolge-Steuersystem 68000-USS enthielt den
68000-Mikroprozessor mit Datenverkehr über gekauftem VME-Datenbus. Das letzte Gerät Pace-USS arbeitete noch 2018 als Zentralcomputer
für die Datenkommunikation zwischen Bedienperson und den mit 68000-USS ausgestatteten Beschichtungsprozessanlagen. 2018 - 1978 =
40 Jahre.
The USS as a universal control system, 1978, was based on the PACE microprocessor
from National Semiconductors Inc. and homemade data bus.
The follow-on 68000-USS control system incorporated the 68000 microprocessor with
Data traffic via purchased VME data bus. The last unit of Pace-USS was still operating in 2018 as the central computer for data communication
between the operator and the 68000-USS equipped coating process equipments. 2018 - 1978 = 40 years.

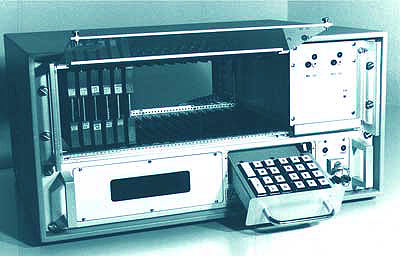
Baugruppenträger dieser Art wurden aufgrund
unserer Entwicklungsvorlagen von Peter Sieberling in Glinde bei Hamburg ins Layout gebracht. Wir und er (als Einmannunternehmer)
arbeiteten 25 Jahre im besten Einvernehmen zusammen. Die MSM-06 (siehe Philips-Zeit Seite 3) hat er, wie ungezählte andere, auch
„gemacht“. Die Jahre der Multilayer-Platinen waren hierzulande noch nicht angebrochen.
Es mag
einleuchten, dass es von Vorteil ist, eine (Abgleich-) Formel wie gezeigt per Software von einem Computer
ausführen zu lassen. Dasselbe Ziel ist auch mit reiner Hardware zu erreichen. Insider wissen, was das bedeuten würde.
Die entsprechende Digitalhardware zu entwerfen und aufzubauen, von einer Analoghardware mal ganz zu schweigen, trüge den Entwicklerspaß
in sich.
Subracks of this type were brought into layout on the basis of our development templates by Peter Sieberling in Glinde near Hamburg. We and he (as a one-man business) worked together for 25 years on the best of terms. He also "made" the MSM-06 (see Philips time page 3), like countless others. The years of multilayer boards had not yet dawned in this country. It may be obvious that it is advantageous to execute a (matching) formula as shown via software by a computer. The same goal can also be achieved with pure hardware. Insiders know what this would mean. To design and build a corresponding digital hardware, not to mention an analog, would carry the developer's fun in itself.
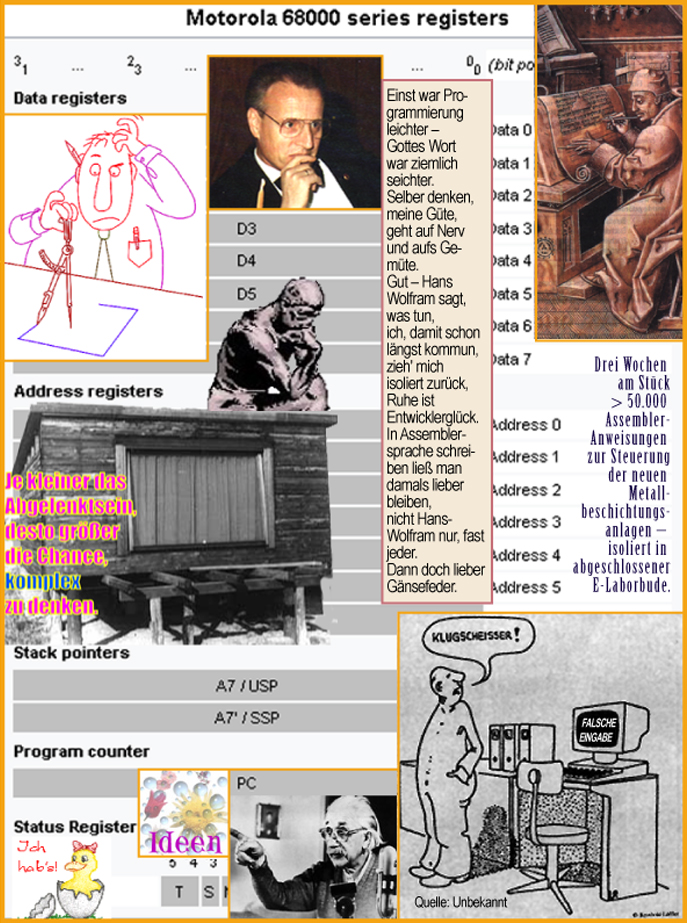
Die Maschinensprache in bits, bytes und words ist jene Daten- und Anweisungssprache, die
in der Hardware von Mikrocontrollern und Mikroprozessoren zu definierten Entscheidungen und Zuweisungen führt. Die mnemotechnisch aufgebaute
Assemblersprache ist dem jeweiligen Hardware-Baustein angepasst mit dem Vorteil, der Maschinensprache so nah wie möglich zu sein. Alle
„höheren“ Programmiersprachen entfernen sich von diesem Vorteil, der in technischen Anwendungen eine große Rolle spielt.
Diese aber wurde infolge höherer Zykluszeiten in den Prozessoren und durch maximierte Programmierbarkeit in höheren Sprachen
wieder kleiner, ohne sich ganz zu verlieren.
Wir hatten uns zunächst für den PACE, dann für den weitaus
leistungsfähigeren 68000-Mikroprozessor von National Semiconductors entschieden. Die Kommunikation mit peripheren Einsteckkarten,
sämtlich eigenentwickelt, erfolgte über den käuflichen VME-Bus. Zu den großen Entwicklungsaufgaben gehörten besondere
komplexe und störsichere Funktions- und Überwachungssteuerungen. Sie ermöglichen beispielsweise, auch nach Ausfall der
Versorgungsspannung von der verlassenen Stelle aus, dass den neuen vom Grundlagenlabor konzipierten Beschichtungsanlagen durchlaufende Chargen
dem rotierenden Rezipient geschleust nacheinander zugeführt werden. Die Inhalte, Keramikkörper in groß geschütteten Mengen,
werden im Hochvakuum per Materialverdampfung im gezündeten Plasma von geeigneten Metallverbindungen unterschiedlich stark überzogen.
Das führt zu unterschiedlichen ohmschen Grundwerten. Entwicklungs- und Konstruktionsabteilungen im eigenen Haus zu haben, Mechanik
(Leitung Horst Sprogis), Physik mit technisch versierten Spezialisten (Leitung Hans-Wolfram Horstmann) sowie Elektrik/Elektronik/software engineering,
war über Jahrzehnte eine wesentliche Voraussetzung für den Fortbestand des Unternehmens. Daraus waren engagierte Tatkraft und berufliche
Sicherheit entstanden, ein „Ende der Welt war noch lange nicht in Sicht“. Dieses „Kapital“ wissentlich oder erfahrungslos vorzeitig
zu ignorieren enthält teure Nachteile für jedes Unternehmen.
The machine language in bits, bytes and words
is that data and instruction language which leads to defined decisions and assignments in the hardware of microcontrollers and microprocessors. The
mnemonic assembly language is adapted to the respective hardware device with the advantage of being as close as possible to the machine language. All
"higher" programming languages move away from this advantage, which in technical applications plays a large role. This however became due to higher
cycle times in the processors and by maximized programmability in higher languages again smaller, without losing itself completely.
We had initially
opted for the PACE, then for the much more powerful 68000 microprocessor from National Semiconductors. The communication with peripheral plug-in cards,
all of them developed in-house, was via the commercially available VME bus. The major development tasks included particularly complex and fail-safe
function and monitoring controls. They allow, for example, even after a failure of the supply voltage from the abandoned location, that the new
coating systems designed by the basic laboratory channeled batches are supplied one after the other to the rotating recipient. The contents, ceramic
bodies in large poured quantities, are coated in a high vacuum with varying degrees of thickness by material evaporation in the ignited plasma from
suitable metal compounds. This leads to different basic ohmic values. Development and and design departments in-house, mechanics (headed by Horst
Sprogis), physics with technically experienced specialists (headed by Hans-Wolfram Horstmann) as well as electrical/electronic/software engineering
has been an essential prerequisite for the continued existence of the company. From this had emerged committed drive and professional security,
an "end of the world was far from in sight". Ignoring this "capital" knowingly or inexperienced prematurely contains expensive disadvantages for
every company.